Пара сил. Момент пары сил
Как известно, сила – основная мера взаимодействия двух тел. Приложим к свободному телу две равные по величине, противоположно направленные силы, которые лежат на параллельных прямых (рис. 3.4). Главный вектор этой системы сил равен нулю, то есть поступательно двигаться это тело не будет. Будет ли оно находиться в равновесии? (Представьте, что вы приложили такую систему сил к водопроводному крану). Какое движение начнется??? Вращательное. То есть надо иметь меру вращательного действия такой системы двух сил:
3.Момент пары сил .
Для измерения совместного вращательного действия сил пары и относительно произвольной точки О (рис. 3.5) найдем сумму моментов этих сил относительно точки О , вспомнив формулу (3.2):

![]() ,
(3.3)
,
(3.3)
или ![]() .
.
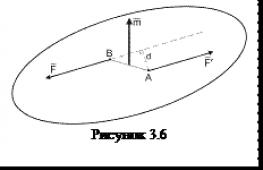
Этот вектор перпендикулярен к плоскости действия пары сил и направлен туда, откуда видно, что вращение тела парой происходит против хода часовой стрелки (рис.3.6).
Величина векторного момента (вектора – момента) пары сил, как модуль векторного произведения, равна ![]() где α
– угол между векторами и (рис. 3.6). Обозначим , где d
– плечо пары.
где α
– угол между векторами и (рис. 3.6). Обозначим , где d
– плечо пары.
Тогда . (3.4)
Если пары сил размещены в одной плоскости, то величины их моментов находятся по формуле (3.4), а векторы этих моментов будут коллинеарные. В этом случае целесообразнее пользоваться не векторным понятием момента пары сил, а алгебраическим .
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на абс. твердое тело. Моментом пары наз. величина, равная взятому с соотв. знаком произведению модуля одной из сил пары на ее плечо (Понятие момента силы связано с точкой, относительно к-рой берется момент. Момент пары определяется только ее моментом и плечом; ни с какой точкой плоскости эта величина не связана). Св-ва: сумма моментов сил пары относительно точки не зависит от выбора точки и всегда равняется моменту пары, пара сил не имеет равнодействующей - нельзя уравновесить одной силой.
Сложение пар сил. Система пар, лежащих в одной плоскости, эквивалентна одной паре, лежащей в той же плоскости и имеющей момент, равный алгебраической сумме моментов слагаемых пар.
Сложение двух параллельных сил. Равнодействующая двух параллельных сил Р 1 и Р 2 (фиг.19, а и б), направленных в одну или в противоположные стороны, равна их алгебраической сумме
R= Р 1 ± Р 2 и делит отрезок между точками приложения сил, внутренним или внешним образом, на части, обратно пропорциональные этим силам:
AC/P 2 =BC/P 1 =AB/R
Это правило неприменимо для равных по величине и противоположных по направлению сил.
10Трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого.

Рис.34
Рассмотрим круглый цилиндрический каток радиуса R и веса , лежащий на горизонтальной шероховатой плоскости. Приложим к оси катка силу(рис. 34, а), меньшуюF пр. Тогда в точке А возникает сила трения , численно равнаяQ , которая будет препятствовать скольжению цилиндра по плоскости. Если считать нормальную реакцию тоже приложенной в точкеА , то она уравновесит силу , а силы иобразуют пару, вызывающую качение цилиндра. При такой схеме качение должно начаться, как видим, под действием любой, сколь угодно малой силы.
Истинная же картина, как показывает опыт, выглядит иначе. Объясняется это тем, что фактически, вследствие деформаций тел, касание их происходит вдоль некоторой площадки АВ (рис. 34, б). При действии силы интенсивность давлений у краяА убывает, а у края В возрастает. В результате реакция оказывается смещенной в сторону действия силы. С увеличениемэто смещение растет до некоторой предельной величиныk . Таким образом, в предельном положении на каток будут действовать пара (,) с моментоми уравновешивающая ее пара () с моментомNk. Из равенства моментов находим или
Пока , каток находится в покое; приначинается качение.
Входящая в формулу линейная величина k называется коэффициентом трения качения. Измеряют величину k обычно в сантиметрах. Значение коэффициента k зависит от материала тел и определяется опытным путем.
Коэффициент трения качения при качении в первом приближении можно считать не зависящим от угловой скорости качения катка и его скорости скольжения по плоскости.
Для вагонного колеса по рельсу k=0,5 мм.Рассмотрим движение ведомого колеса. Качение колеса начнется, когда выполнится условиеQR>M или Q>M max /R=kN/RСкольжение колеса начнется, когда выполнится условие Q>F max =fN.Обычно отношение и качение начинается раньше скольжения.Если, то колесо будет скользить по поверхности, без качения.
Отношение для большинства материалов значительно меньше статического коэффициента трения . Этим объясняетсято, что в технике, когда это возможно, стремятся заменить скольжение качением (колеса, катки, шариковые подшипники и т. п.).
трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого. Вследствие деформации тел их касание происходит вдоль площадки AB (рисунок 2.4, а), появляется распределенная система сил реакции (рисунок 2.4, б), которая может быть заменена силой и парой (рисунок 2.4, в).
Сила раскладывается на две составляющие – нормальную и силу трения скольжения. Пара сил называется моментом сопротивления качению M c .

Рисунок 2.4
При равновесии тела момент сопротивления качению определяется из условий равновесия системы сил. При этом установлено, что момент сопротивления принимает значения от нуля до максимального значения.
Максимальное значение момента сопротивления, соответствующее началу качения, определяется равенством
M c max = Nδ ,
где δ – коэффициент трения качения , имеет размерность длины [м], зависит от материала контактирующих тел и геометрии зоны контакта.
Различают:
чистое качение – точка A (рисунок 2.4) не скользит по неподвижной плоскости;
качение со скольжением – наряду с вращением катка присутствует и проскальзывание в месте контакта, т.е. точка A движется по плоскости;
чистое скольжение – каток движется по плоскости, не имея вращения (см. п.2.1).
Для
того, чтобы каток не скользил, необходимо
условие F
тр <
F
тр
max
Также существует трение верчения – когда активные силы стремятся вращать тело вокруг нормали к общей касательной поверхности соприкосновения.
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на твердое тело (рис. 17).
Плоскость , содержащая линии действия сил пары и называется плоскостью действия сил пары . Кратчайшее расстояние между линиями действия сил пары называется плечом пары .
Вращающее действие пары на твердое тело зависит от модуля сил пары , плеча , положения плоскости действия пары и направления вращения.
Мерой этого действие пары является ее вектор-момент . Если все силы и пары, приложенные к телу, лежат в одной плоскости, то момент пары можно рассматривать как алгебраическую величину, равную
Момент пары считается положительным , если он стремиться вращать тело против хода часовой стрелки и отрицательным , если - по ходу часовой стрелки.
Момент пары, как и момент силы, измеряется в (система СИ) и в (система МКГСС).
Алгебраическая сумма моментов сил пары относительно произвольной точки в плоскости ее действия не зависит от выбора этой точки и равна моменту пары. Действительно, определим сумму моментов сил и пары (рис. 18) относительно произвольной точки , расположенной в плоскости действия пары.
Так как , то получим:
Если силы и пары, приложенные к телу, лежат в разных плоскостях, то момент пары, как и момент силы, необходимо рассматривать как вектор. Вводим в связи с этим общее определение момента пары.
Моментом пары является вектор , равный по модулю произведению модуля сил пары на ее плечо и направленный перпендикулярно плоскости ее действия в ту сторону, откуда поворот, который пара стремится сообщить телу, виден происходящим в направлении против хода часовой стрелки (рис. 17).
Модуль вектора равен
Из определения векторов и следует, что момент пары (рис. 17) равен по модулю и направлению моменту любой из сил пары (например, ) относительно точки приложения другой, то есть
Используя формулу 16, имеем:
Таким образом, момент пары можно представить в виде векторного произведения (23), в котором – радиус-вектор точки приложения силы относительно точки приложения силы (рис.17).
Свойства пар выражаются следующими теоремами, которые приводятся здесь без доказательств.
1) Действие пары на твердое тело не изменится, если перенести пару в плоскости ее действия в любое другое положение.
2) Действие пары на твердое тело не изменится, если модуль сил пары и ее плечо изменить так, чтобы модуль момента пары сохранился неизменным.
3) Действие пары на твердое тело не изменится, если перенести пару в любую другую плоскость, параллельную плоскости ее действия.
4) Система пар, приложенных к твердому телу, может быть заменена одной результирующей парой с моментом , равным геометрической сумме моментов слагаемых пар:
Из теорем следует, что пару, выраженную вектором , в твердом теле можно как угодно перенести в плоскости действия пары, а также перенести в любую параллельную плоскость; поэтому момент пары является свободным вектором , т.е. его можно изобразить приложенным в любой точке твердого тела.
Вопросы для самопроверки к разделу 2
1. Определить момент силы относительно точки как алгебраическую величину, как вектор.
2. В каком случае момент силы относительно точки равен нулю?
3. Что называется моментом силы относительно оси?
4. В каких случаях момент силы относительно оси равен нулю?
5. Можно ли открыть дверь, если все приложенные к ней силы располагаются в плоскости двери?
6. Какова зависимость между моментами силы относительно оси и относительно точки, лежащей на этой оси?
7. Выведите формулы для моментов силы относительно трех координатных осей, используя представление о векторе момента силы относительно точки в виде векторного произведения.
8. Что называется парой сил? Чему равен момент пары?
9. Какие факторы определяют действие пары на твердое тело?
10. Как направлен, где приложен вектор момента пары?
11. Сформулируйте условие равновесия системы пар сил, приложенных к твердому телу.
12. Могут ли уравновесить друг друга две пары сил, лежащие в параллельных плоскостях; в пересекающихся плоскостях?
13. Каким образом можно изменять плечо и модуль сил пары, не изменяя действие пары на твердое тело?
14. Как складываются пары, лежащие в одной плоскости; в пересекающихся плоскостях?
При рассмотрении пространственной системы сил применяется понятие момента силы относительно центра (или точки).
Определение.
Моментом силы
относительно центра О называется
приложенный в центре О вектор ,
модуль которого равен произведению
модуля F силы на ее плечо h и который
направлен перпендикулярно плоскости,
проходящей через центр О и силу, в ту
сторону, откуда сила видна стремящейся
повернуть тело вокруг центра О против
хода часовой стрелки (рис. 17). Плечом
h силы F относительно центра О называют
длину отрезка перпендикуляра, опущенного
из точки О на линию действия силы.
,
модуль которого равен произведению
модуля F силы на ее плечо h и который
направлен перпендикулярно плоскости,
проходящей через центр О и силу, в ту
сторону, откуда сила видна стремящейся
повернуть тело вокруг центра О против
хода часовой стрелки (рис. 17). Плечом
h силы F относительно центра О называют
длину отрезка перпендикуляра, опущенного
из точки О на линию действия силы.
Согласно этому определению
Измеряется момент силы в ньютон-метрах (Н·м).

Для
нахождения формулы, которая выражает
вектор
 ,
рассмотрим векторное произведение
,
рассмотрим векторное произведение .
По определению
.
По определению
Направлен
вектор
 перпендикулярно плоскости OAB в ту
сторону, откуда кратчайшее совмещение
перпендикулярно плоскости OAB в ту
сторону, откуда кратчайшее совмещение с
с (если их отложить от одной точки) видно
происходящим против хода часовой
стрелки, т.е. так же, как вектор
(если их отложить от одной точки) видно
происходящим против хода часовой
стрелки, т.е. так же, как вектор .
Следовательно, векторы
.
Следовательно, векторы и
и выражают одну и ту же величину. Отсюда
выражают одну и ту же величину. Отсюда
 или
или
 ,
(12)
,
(12)
где
 –
радиус-вектор точки А, проведенной из
центра О.
–
радиус-вектор точки А, проведенной из
центра О.
Момент
силы
 имеет следующие свойства:
имеет следующие свойства:
1) момент силы относительно центра не изменится при переносе точки приложения силы вдоль ее линии действия;
2) момент силы относительно центра О равен нулю или когда сила равна нулю, или когда линия действия силы проходит через центр О (плечо равно нулю).
§7. Алгебраический момент силы относительно центра
При
рассмотрении плоской системы сил
используется понятие алгебраического
момента силы относительно центра. Когда
все силы системы лежат в одной плоскости,
их моменты относительно любого центра
О находящегося в той же плоскости,
перпендикулярны этой плоскости, т.е.
направлены вдоль одной и той же прямой.
Тогда, не прибегая к векторной символике
можно направления этих моментов отличить
одно от другого знаком и рассматривать
момент силы
 относительно центра О как алгебраическую
величину. Условимся такой момент называть
алгебраическим и обозначать символом
относительно центра О как алгебраическую
величину. Условимся такой момент называть
алгебраическим и обозначать символом .
Алгебраический момент силы
.
Алгебраический момент силы относительно центра О равенвзятому
с соответствующим знаком произведению
модуля силы на ее плечо, т.е.
относительно центра О равенвзятому
с соответствующим знаком произведению
модуля силы на ее плечо, т.е.
 .
(13)
.
(13)
При
этом момент считается положительным,
когда сила стремится повернуть тело
вокруг центра О против хода часовой
стрелки, и отрицательным – когда по
ходу часовой стрелки. Так для сил,
изображенных на рис. 18:
 ,
, .
.

§8. Пара сил. Момент пары
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на абсолютно твердое тело (рис. 19, а).

Система
сил
 ,
, ,
образующих пару, не находится в равновесии
(эти силы не направлены вдоль одной
прямой (аксиома 1)). В то же время пара
сил не имеет равнодействующей поскольку
,
образующих пару, не находится в равновесии
(эти силы не направлены вдоль одной
прямой (аксиома 1)). В то же время пара
сил не имеет равнодействующей поскольку .
Поэтому свойства пары сил, как нового
самостоятельного элемента статики,
должны быть рассмотрены отдельно.
.
Поэтому свойства пары сил, как нового
самостоятельного элемента статики,
должны быть рассмотрены отдельно.
Плоскость, проходящая через линии действия сил пары, называется плоскостью пары. Расстояние d между линиями действия сил пары называется плечом пары . Действие пары сил на твердое тело сводится к некоторому вращательному моменту пары .
Определение:
моментом пары сил называется вектор
 ,
модуль которого равен произведению
модуля одной из сил пары на ее плечо и
который направлен перпендикулярно
плоскости действия пары в ту сторону,
откуда пара видна стремящейся повернуть
тело против хода часовой стрелки
(рис. 19, б), т.е.
,
модуль которого равен произведению
модуля одной из сил пары на ее плечо и
который направлен перпендикулярно
плоскости действия пары в ту сторону,
откуда пара видна стремящейся повернуть
тело против хода часовой стрелки
(рис. 19, б), т.е.
 .
.
В отличие от момента силы вектор пары является свободным вектором, т.е. его можно переносить в любую точку тела.
Моменту пары можно дать другое выражение: момент пары равен сумме моментов относительно любого центра О сил, образующих пару, т.е.
 .
(14)
.
(14)

Для
доказательства проведем из произвольной
точки О (рис. 20) радиусы векторы
 и
и .
Тогда согласно формуле (12), учтя еще, что
.
Тогда согласно формуле (12), учтя еще, что ,
получим
,
получим
 ,
и, следовательно
,
и, следовательно
где
 .
.
Так
как
 ,
то справедливость равенства (14) доказана.
Отсюда, в частности, следует уже отмеченный
выше результат
,
то справедливость равенства (14) доказана.
Отсюда, в частности, следует уже отмеченный
выше результат
 или
или
 ,
(15)
,
(15)
т.е. момент пары равен моменту одной из ее сил относительно точки приложения другой силы. Отметим еще, что модуль момента пары
Из формулы (14) следует, что две пары сил, имеющие одинаковые моменты, эквивалентны.
Из
формулы (14) следует еще, что если на тело
действует несколько пар с моментами
 ,
, , …,
, …,  то сумма моментов всех сил, образующих
эти пары, относительно любого центра
будет равна
то сумма моментов всех сил, образующих
эти пары, относительно любого центра
будет равна ,
а следовательно, вся совокупность этих
пар эквивалентна одной паре с моментом
,
а следовательно, вся совокупность этих
пар эквивалентна одной паре с моментом
 .
(17)
.
(17)
Этот результат выражает теорему о сложении пар.